ROBOT VISION
VOLLAUTOMATISCHES GREIFEN UND ABLEGEN VON BAUTEILEN UND LAGERWARE
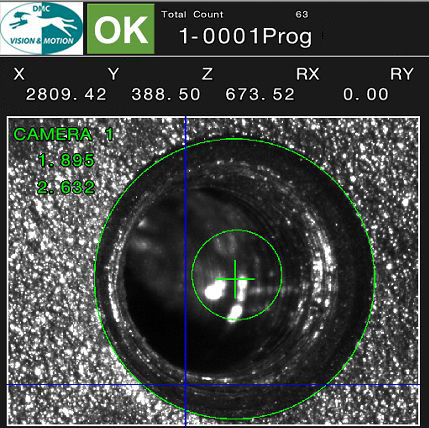
Korrigieren der XY-Koordinaten mit bis zu vier, am Robotergreifer mitgeführten Messkameras oder stationären Kameras mit Spezialbeleuchtung zur deutlichen Erkennung der Positionsmerkmale. Bestimmen der Z-Koordinate über Laser oder 3D-Sensoren.
Einbau aller Vision-Komponenten mit hochauflösenden Kameras und Beleuchtungen am Robotergreifer oder über der Roboterzelle
- Vorteile:
- Fehlerhafte Positionierung über Teach-Positionen und manuelles Ablegen von schweren Lasten entfällt.
- Kleinste Abweichungen werden korrigiert.
- Automatisches Laden des Erkennungsprogramms beim Umrüsten
- Vielfältige Menüfunktionen
Technische Daten
| Messzeit: | 0,5 sec / Teil |
| MMessgenauigkeit: | ± 100µ |
| Messgenauigkeit: | ±100 µ |
| Steuerung: | Bewertungsübertragung per Ethernet oder Profinet, Speichern der NG-Daten und Bilddateien auf Flashspeicher |
{kind=link}
{kind=link}
{kind=link}
{kind=link}